体験操縦!
同じ日。
師匠の事務所の近く、栃木県のとある河原にあるRC飛行場にて、初めてドローンの体験操縦をさせてもらった。
操縦したのはDJIのPhantom3。
それまでやっていた飛行機やラジコンヘリに比べると、簡単すぎて拍子抜けだった。
危なくなったら送信機からスティックを離せばその場で静止する。その安定性には本当に驚く。
普通に飛ばすだけなら、初めて飛ばす人でも絶対に落ちないと思う。
なので、自分的にはそういう技術の進歩には驚愕したが、それだけであった…笑
一応、ドローンの飛行原理と操縦法を纏めておこうと思ったので書きます笑
ドローンの飛行原理
ドローン…正確には無人航空機全般を「ドローン」と呼ぶそうだが、ここで書くドローンは一般的なマルチコプター=複数のプロペラによって飛ぶもの、更に、一番一般的なクアッドコプターについて書こうと思います。
その制御はヘリに比べると至ってシンプルです。
ヘリはメインローター(大きなプロペラ)の回転面を進行方向に向ける or 回転中にプロペラのピッチ(角度)を変えて、進行方向の前後で揚力差をつける事で進みます。(揚力が大きい方から小さい方に進む)
常に回転してるものの角度を変えるなんて、考えただけで複雑なメカニズムが必要なのは容易に想像できますが、ドローン(クアッドコプター)の場合は全て、4つのプロペラの回転差で動きがコントロールできます。
ドローン…というか、全ての空モノラジコンは車(2次元の平面を移動する)と違ってタテ・ヨコ・高さの3次元空間を移動しますが、その操縦には以下の
- タテ(前後=ピッチ軸)
- ヨコ(左右=ロール軸)
- 高さ(高度=スロットル)
- 機首の向き(ヨー軸)
の4方向をコントロールすることになります。
説明しやすい順に、順番に見ていきます。
高さ(高度=スロットル)
至ってシンプル。

上昇:4つのプロペラ全ての回転数を上げていき、プロペラが生み出す推力が、地球の重力を上回れば上昇していきます。
静止:その回転数を少しずつ下げていくと、地球の重力と、上昇しようとする力が釣り合うポイントがあります。その回転数を維持すれば、高度は変わらない=高度は静止します。
下降:高度が静止する回転数から更に少しずつプロペラの回転数を下げれば、重力のほうが打ち勝って下降していきます。
タテ(前後=ピッチ軸)
前進:4つのプロペラのうち、図の2つのプロペラ(3番・4番)の回転数を上げれば、機体は後ろが持ち上がり、前に倒れる形になります。
前に倒れると、プロペラの回転面が斜めになり、それまでは下向きだけだった推力が、斜め下(前進の場合、斜め後ろ)に向けられる事になり、結果、機体は前に進みます。
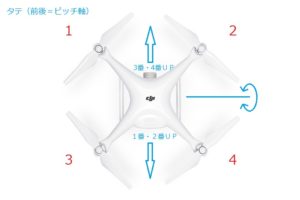
後退したい時は、逆の2つのプロペラ(1番・2番)の回転数を上げれば前進とは逆向きの力が加わって、後退していきます。
ヨコ(左右)
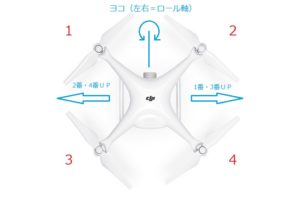
原理はタテ方向と全く同じ。
回転数を上げるプロペラが違うだけです。
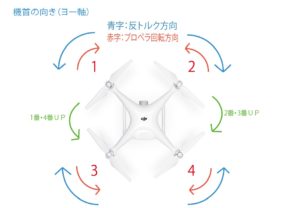
機首の向き(ヨー軸)
これが一番ややこしい。
回転する物体(この場合プロペラ)には、常に回転方向と反対方向に「反トルク」という力がかかります。これはもう物理の法則で決まっていて、避けられません。
ヘリコプターの後ろについている小さなプロペラ(テールローター)は、その反トルクによって機体がメインローターと反対方向に回ろうとする力を押さえ込んでいます。
更に、テールローターの回転数(またはピッチ)を変えて、テールローターの推力を変化させることで、機首の向きを変える事が出来ます。
当然、あの小さなプロペラがなくなれば、機体はクルクルと回ってしまい、操縦不能になります。
反トルクを打ち消す方法としては幾つかあって、
・ヘリコプターのようにテールローターをつけて、反トルクを押さえ込む方向
・メインローターを2枚付けて、それぞれ時計回り・反時計回りと反転させて回す事で、お互いの反トルクを打ち消す方法(二重反転プロペラ)
そしてドローンの場合は二重反転プロペラと似たような考え方で、隣り合うプロペラをそれぞれ逆の方向に回すことで、反トルクを打ち消しています。
機首の向きを変える時は、対角線上の2つのペラの回転数を変化させることで、反トルクを利用して回っている=機種の向きを変えている事になります。
以上、4方向の動きであるけれど、実際はその4方向の動きをミックスさせて、ドローンは自由に空を飛び回っています。
実際は、風、重心、その他さまざまな要因で、たとえ4つのペラを同じ回転数で回したとしても、ドローンはいずれかの方向に勝手に進んでいきます。
近年の技術がすごいのは、加速度センサーやジャイロセンサー、GPSを使い、その「勝手な動き」を検知して、元の位置からずれないよう、それぞれのプロペラの回転数を自動で制御し、送信機のスティックを離せばビタ!っとその場に静止できるレベルで機体を制御しているところです。
筆者が初めて体験操縦をした時、最も驚愕したのはこの技術についてでした。
操縦モード
主に、モード1とモード2があります。
日本では、昔からラジコンをやっている人はもっぱらモード1の人が多いです。
対して、諸外国ではモード2が多い。というか、日本を除く世界の標準はモード2だと思います。
何故日本がモード1で定着したのか?は諸説あります。
最近は送信機の設定で簡単にモード1・2が変更できるので、やりやすい方で大丈夫だと思います。
モード2の方が、実機の操縦桿の動きに近いので操縦しやすいという話もある。
筆者も、なるほどー・・たしかに操縦桿の動きと同じだなぁ・・とは思いますが、筆者は昔からラジコンやっていた人なので、モード1で覚えてしまってるので今のところ変えるつもりはない笑
危なくなったらスティック離せば落ちずにその場に停止するドローンならば、モード2でも操縦できそうだけど、常に動いていて、ドローンよりも緊張を強いられる飛行機を飛ばす場合には、慣れ親しんだモード1じゃないと飛ばす勇気が出ません笑
もし、これから空モノのラジコンをする人ならば、モード2で始めた方がいいかもしれないです。
世界標準だし。実機に近いし。










 名前 : 岡崎 慎一
名前 : 岡崎 慎一